ROTARY STEPPER MOTORS > NEMA 24
Rotary Stepper Motor
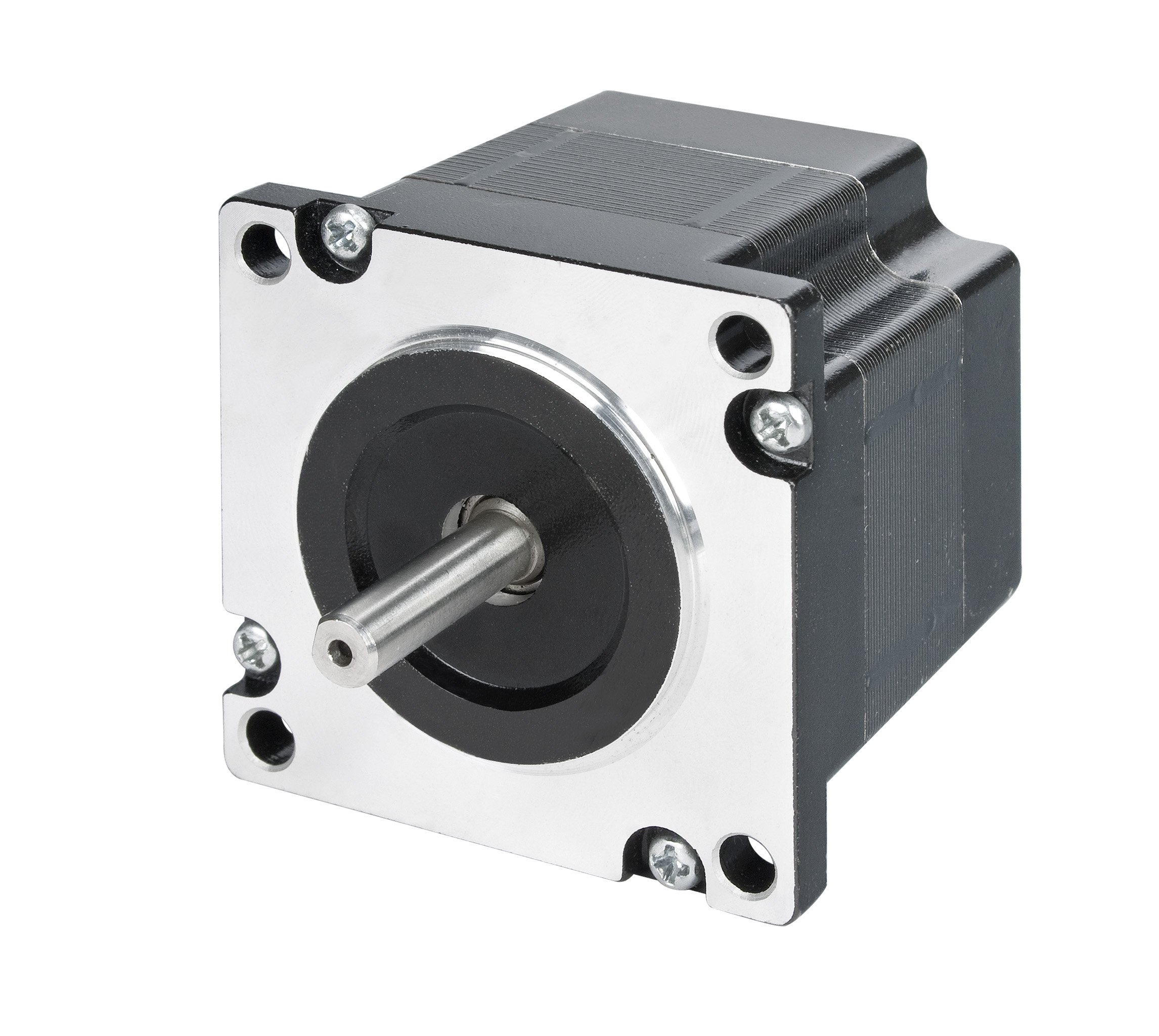

NEMA 24 (60mm)
Built for heavy-duty applications requiring high torque and precision, NEMA 24 stepper motors excel in CNC milling machines, plasma cutters, and industrial automation systems. Their sturdy design and powerful performance make them ideal for tasks demanding accurate motion control and reliability under challenging conditions.
Encoders available upon request.